 2024/10/04 09:40
2024/10/04 09:40
基于肌动学接口的植入式磁体假肢控制:上肢截肢者抓握功能的恢复
2024/10/04 09:40
近日,意大利Sant’Anna高等研究院的生物机器人研究团队在《Science Robotics》上发表了一项关于恢复上肢截肢患者抓握能力的新研究。研究通过植入磁体的肌肉动力学假肢,利用肌肉的变形实时控制机器人手臂,实现了功能恢复,为上肢截肢患者提供了全新的解决方案。
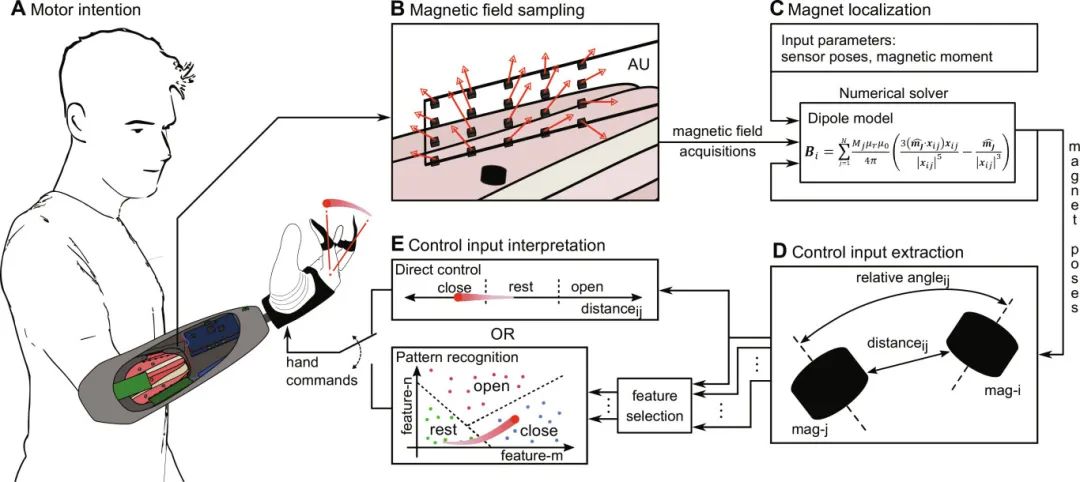
手部截肢对患者的日常生活和独立性带来了极大的影响。近年来,随着生物医学工程的进步,通过植入神经肌肉接口(HMI)技术,能够将大脑的运动意图转化为假肢的精细动作,极大地提升了截肢患者的运动功能恢复。然而,现有的假肢控制系统大多依赖于电生理信号,存在一些技术限制。为了解决这些问题,研究团队提出了一种基于肌肉变形和磁场检测的全新肌动学接口,通过植入磁体感应肌肉的收缩变化,提供了更精确、稳定的假肢控制方案。
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
研究团队在患者残肢的三个肌肉部位植入了六个永久磁体,分别放置在屈腕尺侧肌(FCU)、伸指肌(ED)和屈拇长肌(FPL)的近端和远端位置。通过外部传感器阵列实时监测这些磁体的位移变化,将肌肉收缩转换为信号控制假肢。该系统包括一个自我容纳的肌动学假肢,内置所有硬件组件,患者在六周的试验期内接受了功能测试,控制假肢进行抓握、放置等多项任务。
1. 磁体的位移稳定性与超声监测
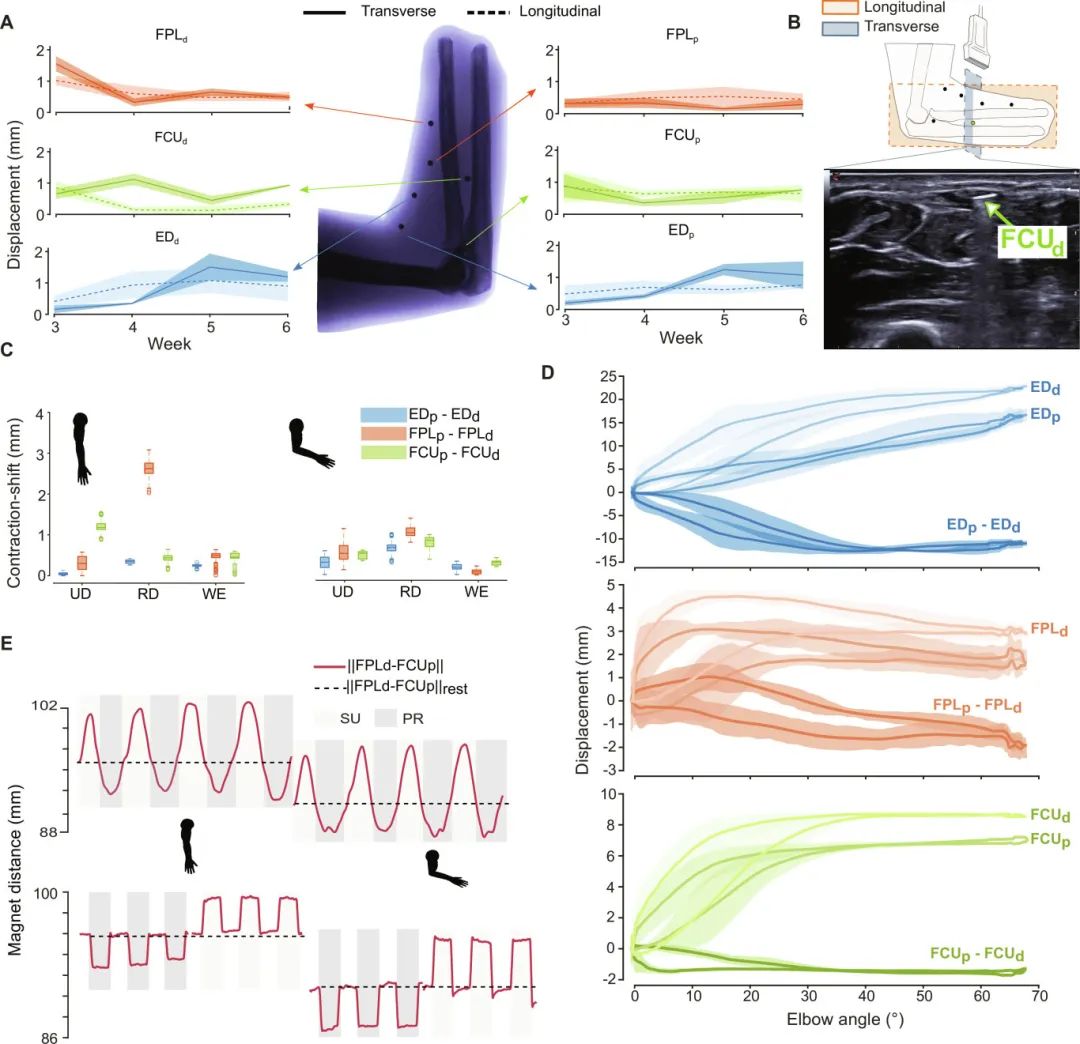
通过超声波影像和传感器数据监测了植入磁体的位移。结果显示,植入的磁体在患者肌肉收缩时的位移变化非常稳定,最大位移达到6毫米,主要在拇指屈曲和前臂旋转动作中观察到,证实了这些磁体能够精确感应肌肉的变形。图1展示了每个植入磁体在不同动作下的位移情况,包括放松和收缩状态下的位移变化。
2. 假肢的控制策略
(1)直接控制策略
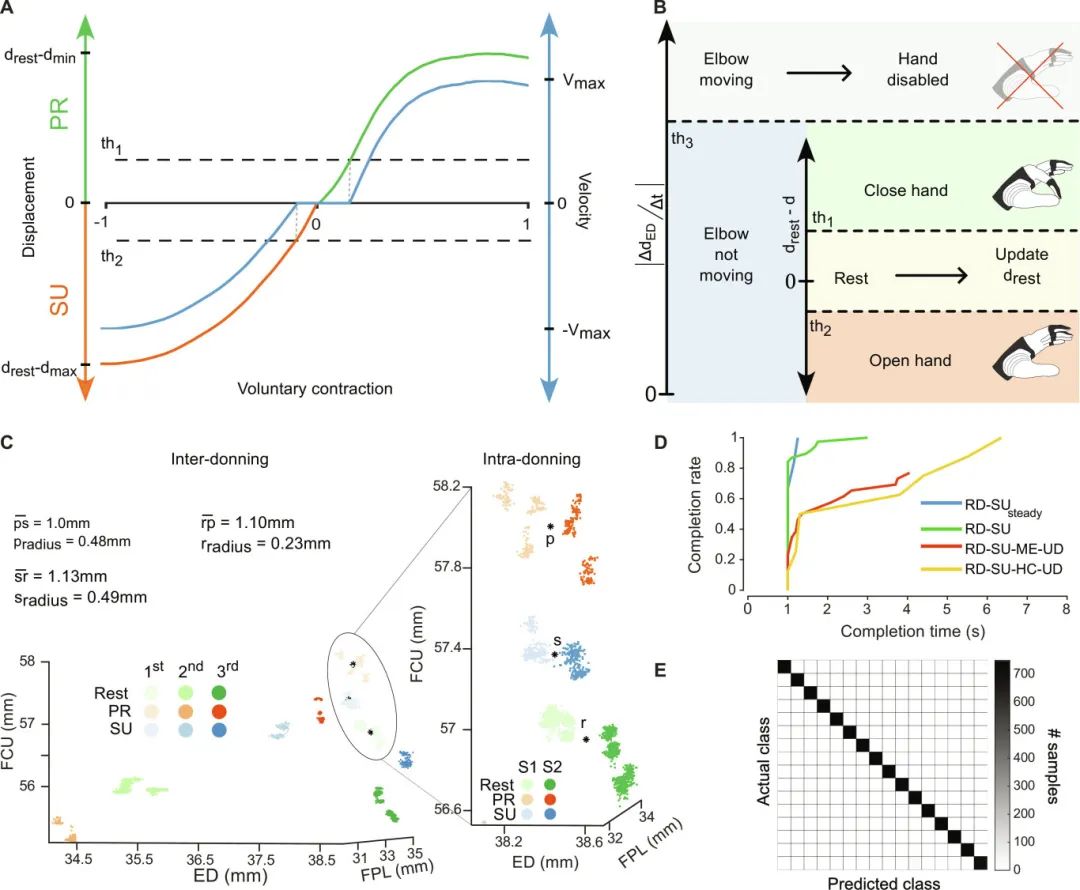
通过监测屈腕尺侧肌(FCU)和屈拇长肌(FPL)之间的位移变化,患者可以通过手腕的旋转和前臂运动实现假肢的开合动作(图2A-B)。研究通过正负阈值设置来触发假肢的打开和关闭,患者能够灵活地控制假肢的操作,并且系统对肌肉收缩信号反应快速。
(2)模式识别与多动作控制
研究还引入了基于支持向量机(SVM)算法的模式识别系统,通过分析不同肌肉的收缩模式,系统能够识别复杂的动作,如手的打开、关闭和休息等状态,并驱动假肢执行多种精细操作。图3E展示了不同肌肉活动模式的识别结果,表明该系统能够准确区分不同的动作模式,并在多次重复的实验中保持较高的分类准确率。
3. 功能性测试
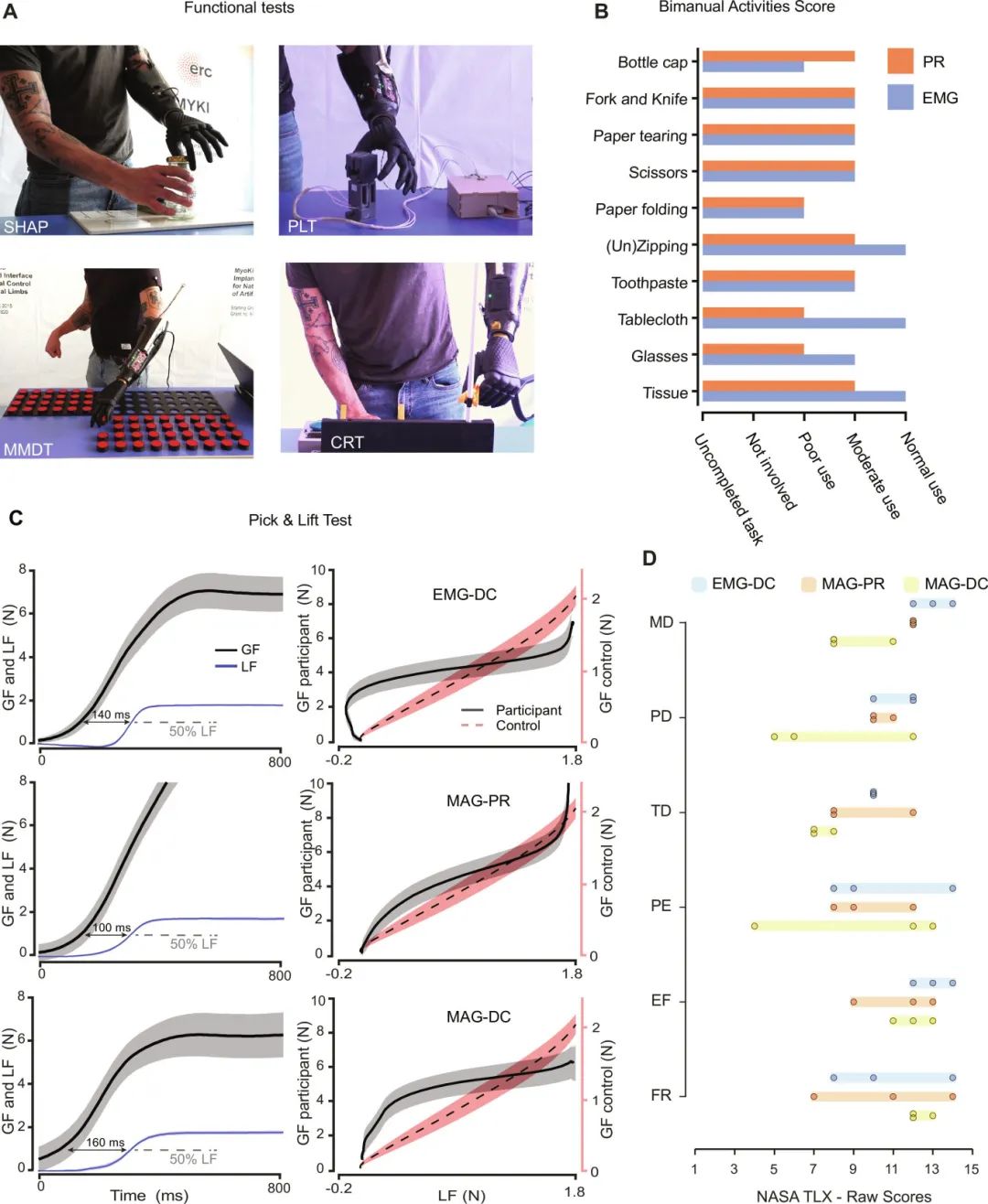
患者通过肌动学假肢系统完成了多个功能性测试,包括Southampton手部评估程序(SHAP)、明尼苏达手动灵活性测试(MMDT)和夹子转移任务(CRT)。测试结果显示,肌动学假肢的性能与传统的肌电假肢相当,且在某些任务中表现更为出色,尤其是在需要精细力量控制的任务中。图3展示了患者在这些测试中的表现,证明了肌动学接口在实际操作中的可靠性和灵活性。
这项研究展示了肌动学接口技术在假肢控制中的应用前景,通过植入磁体并感应肌肉变形,患者能够实现自然的假肢操作。未来,这一技术有望进一步发展,并应用于更多的截肢患者,为他们提供更高的生活质量和独立性。
来源:BME康复工程分会
仅用于学术分享,若侵权请留言,即时删侵!
本文来自新知号自媒体,不代表商业新知观点和立场。 若有侵权嫌疑,请联系商业新知平台管理员。 联系方式:system@shangyexinzhi.com